Elbow design
----手肘设计----
轻量化 灵活性
手臂设计在确保刚度的同时,实现了轻量化和灵活性,为机器人行业提供了新的解决方案-
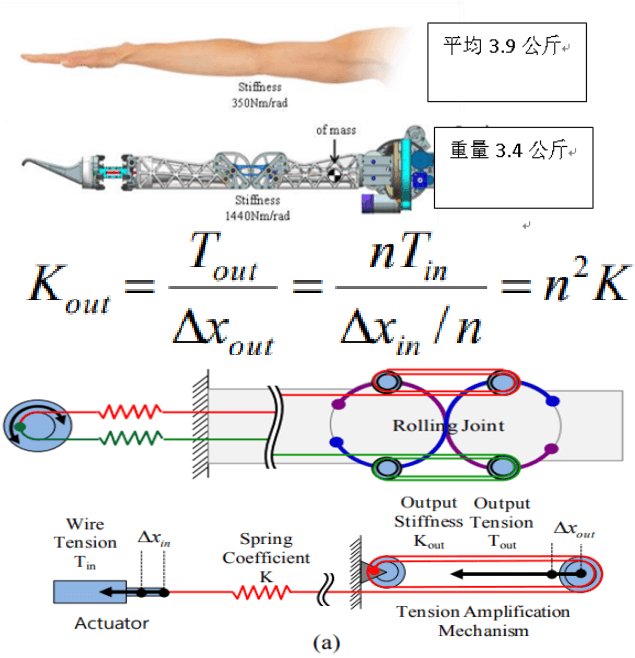
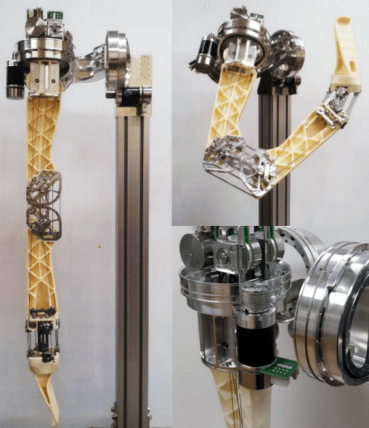
重量与重心与人手臂相似:重心位于上臂靠近肩膀的40%处。
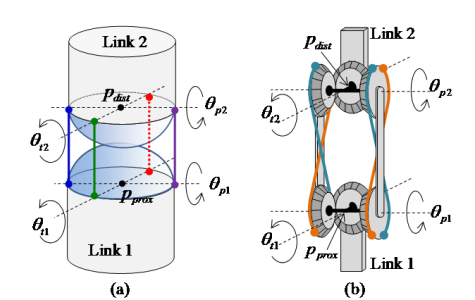
定滑轮组减速机构:关节刚度提升n平方倍。
滚动关节创新:对称拉线分布,简化线绳结构,提高效率。 -
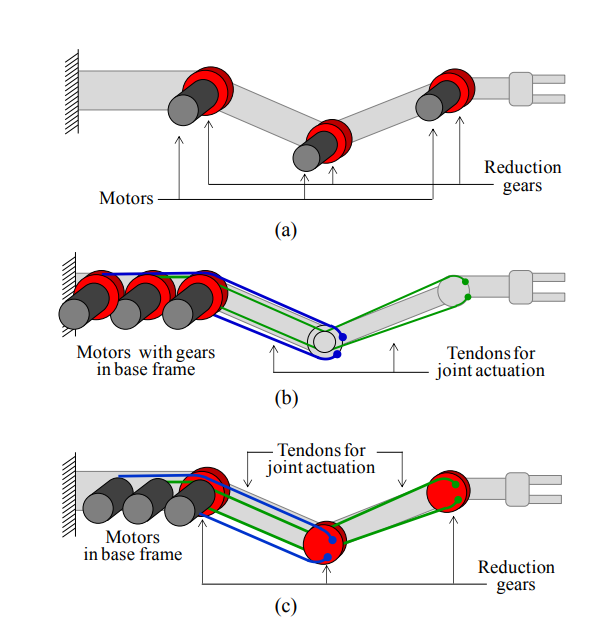
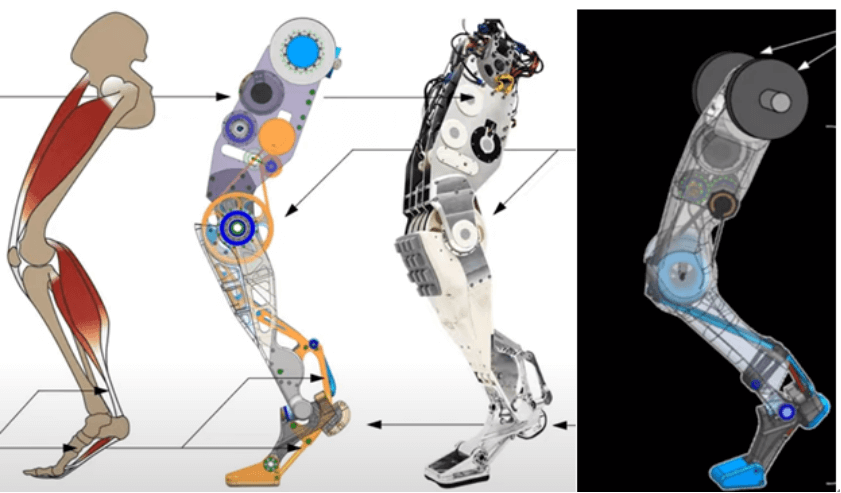
构型对比: 图(a) - 传统机械手:关节刚度高,但重量分布关节处转动惯量大。
图(b) - 肌腱手臂:质量集中肩部转动惯量小,但线绳弹性影响刚度。
图(c) - 本项目构型:刚度和质量分布的优化折衷。 -
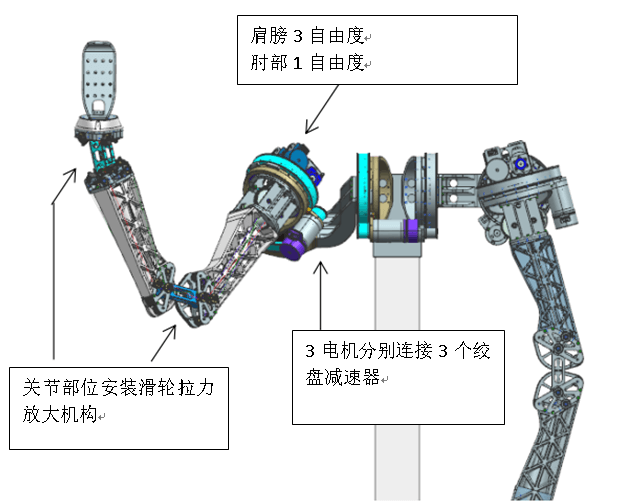
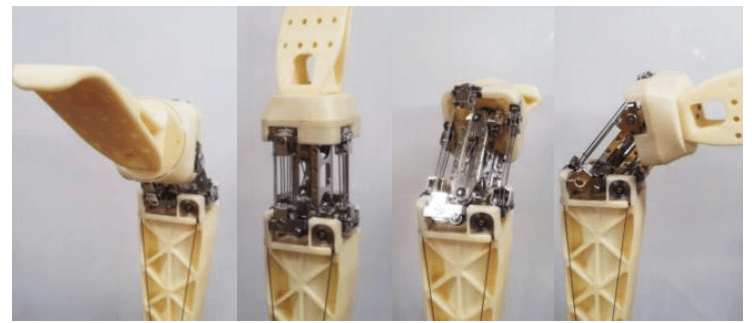
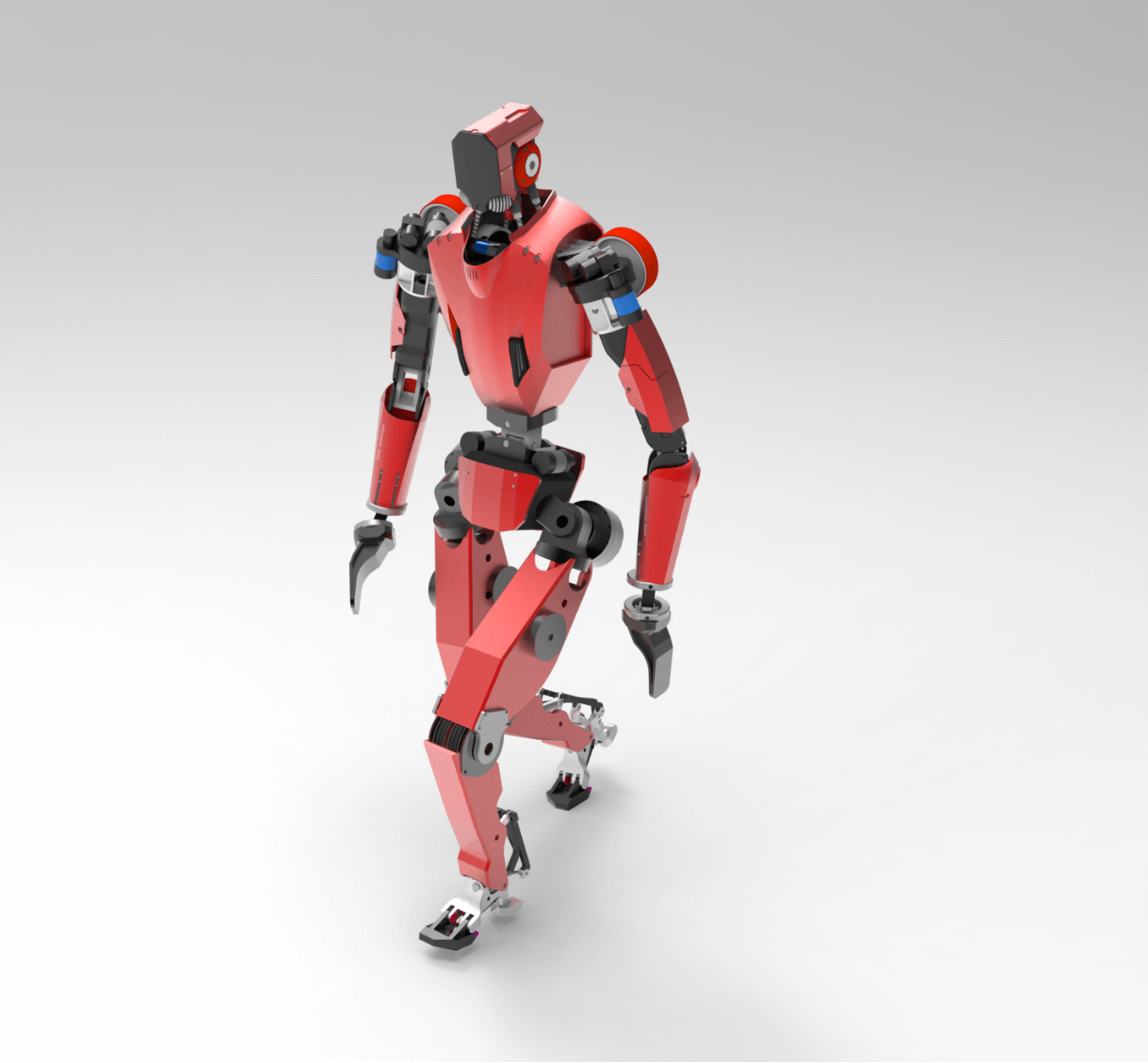
手部设计创新: 7自由度高灵活性。
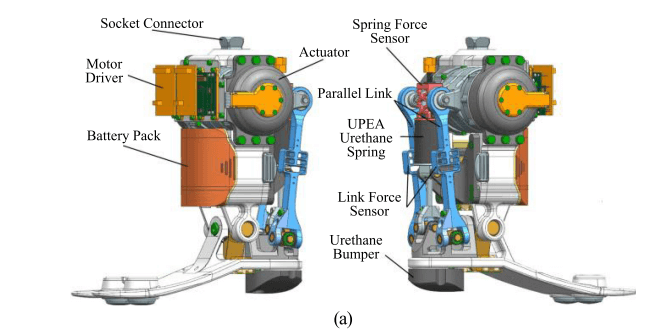
电机布局优化:四个电机肩部安装,降低转动惯量。
独特减速机构:拉力绳驱作为减速器和拉力放大器,保障关节刚性,减轻重量惯性。